Projects
Welcome
Projects
Bits & Pieces
Snippets
Reviews
Tools
About
Welcome
Projects
Helmholtz Cage
Introduction
Overview
Coil Drive
Results
Linear Actuator
Introduction
Overview
Hardware
Software
Results
Mini Cube Robot
Introduction
Overview
Hardware
Software
Results
Add-on Boards
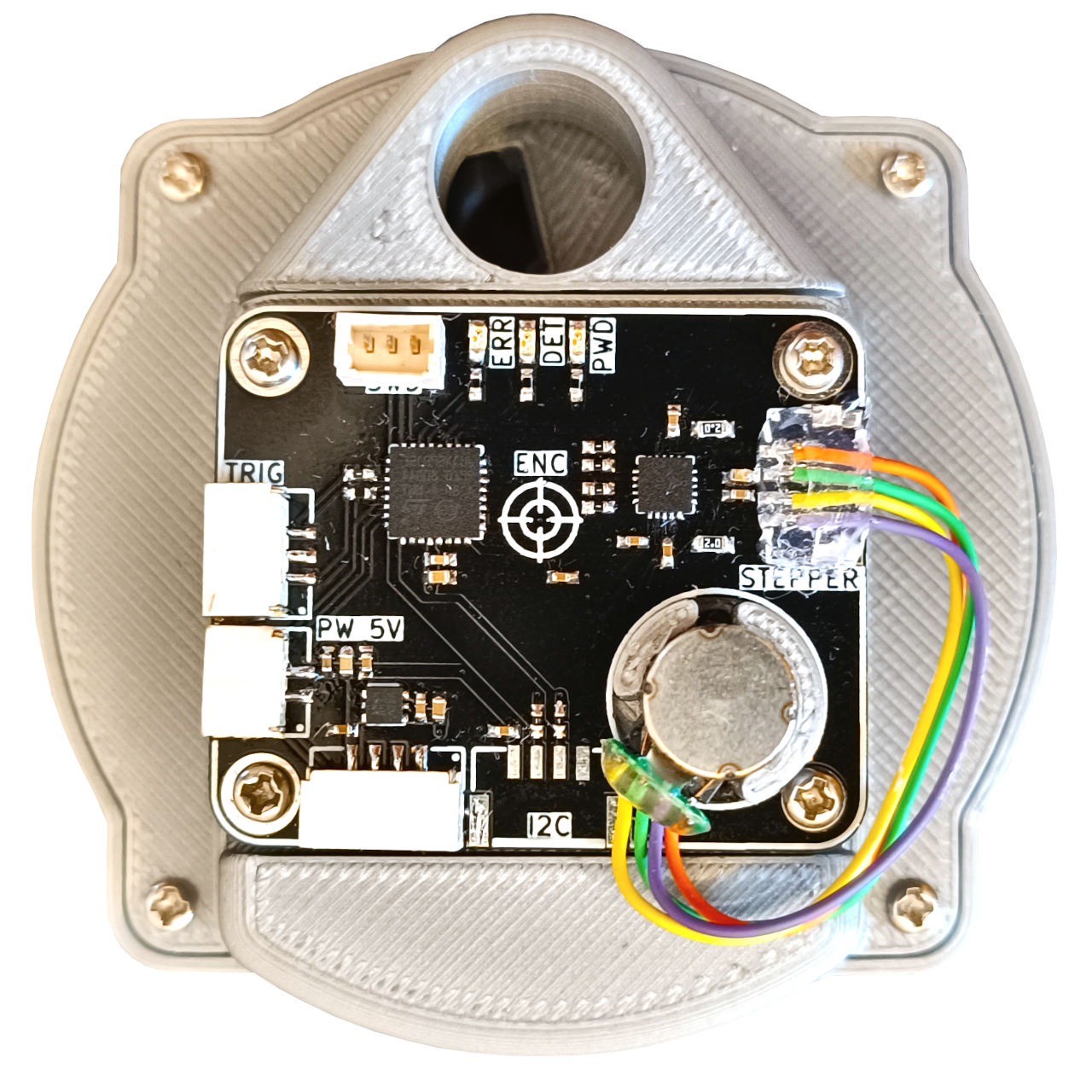
Mini Optical Filter Wheel
Introduction
Overview
Controller
Software
Results
Motor Test Stand
Introduction
Hardware
Software
Results
More...
Bits & Pieces
AFSK
What is AFSK?
Digital Modulation Implementation
Digital Demodulation Implementation
Bit and Bit Clock Recovery
AX5043
The Ultimate Sub-GHz Radio?
RF Frequency Generation
TX Settings
RX Settings
Encoding and Framing
Controlling the Radio
Advanced Features
Experimental Features
Digital Filters
Introduction
FIR Filter
IIR Filter
CIC Filter
ARM CMSIS-DSP Benchmark
DSP Accelerators
Introduction
CORDIC (COordinate Rotation DIgital Computer)
FMAC (Filter Math ACCelerator)
ADC Oversampling
HDLC/AX.25
AX.25 Frame Generator
Overview
AX.25
KISS
HDLC
Encoding
More...
Snippets
AliExpress Parts
Depth Vision Module
Serial Bus Servo
HD Video on MCUs
HD Video on MCUs: MIPI Camera Interfaces and Hardware Encoders
PX4 Autopilot
Connection to companion computer
Reviews
Antennas
Dual Band Antennas
Korad KD3305P+
Introduction
Observations (Q&A)
Remote Control
Tools
About
PlumaN6 HD
STM32N6 controller with Cortex-M55, NPU & VENC. Integrates vision and real-time control in a single-chip solution, eliminating the need for Linux SBCs.
Mini Optical Filter Wheel
Compact, low-cost DIY optical filter wheel for 8x8mm filters. Ideal for hobbyist optics, spectroscopy, and imaging projects.
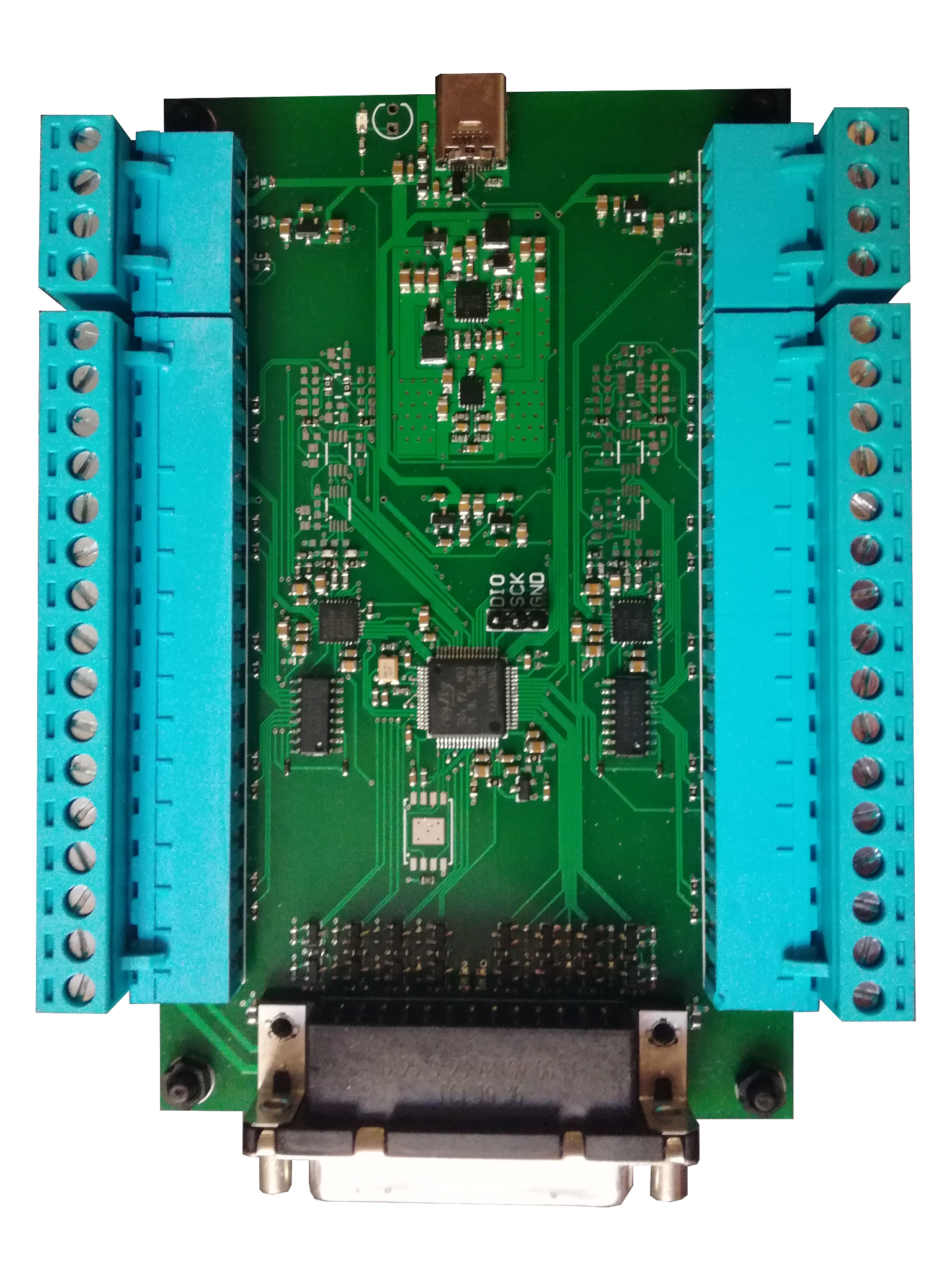
STM32G4 DAQ
A DAQ with 8 Differential, 16 Single Ended $ \pm 12\ V $ analog input channels and four $ \pm 12\ V $ analog outputs. Using the new STM32G4 MCU and the ADA5254 programmable gain instrumentation amplifier.
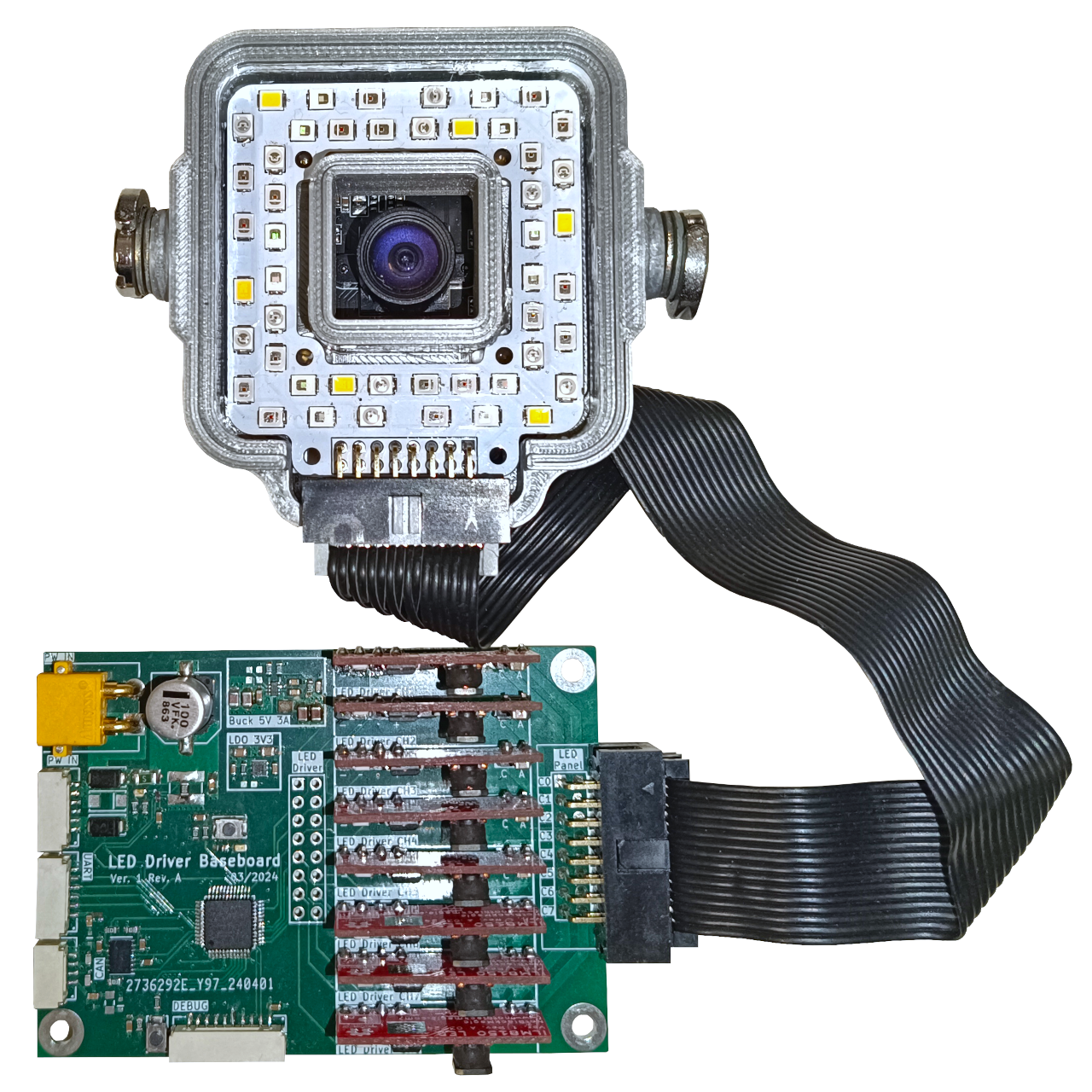
Spectral Imaging System
High-performance 8-channel LED driver for multispectral illumination, enabling precision lighting with up to 8 bands for advanced imaging and sensing.
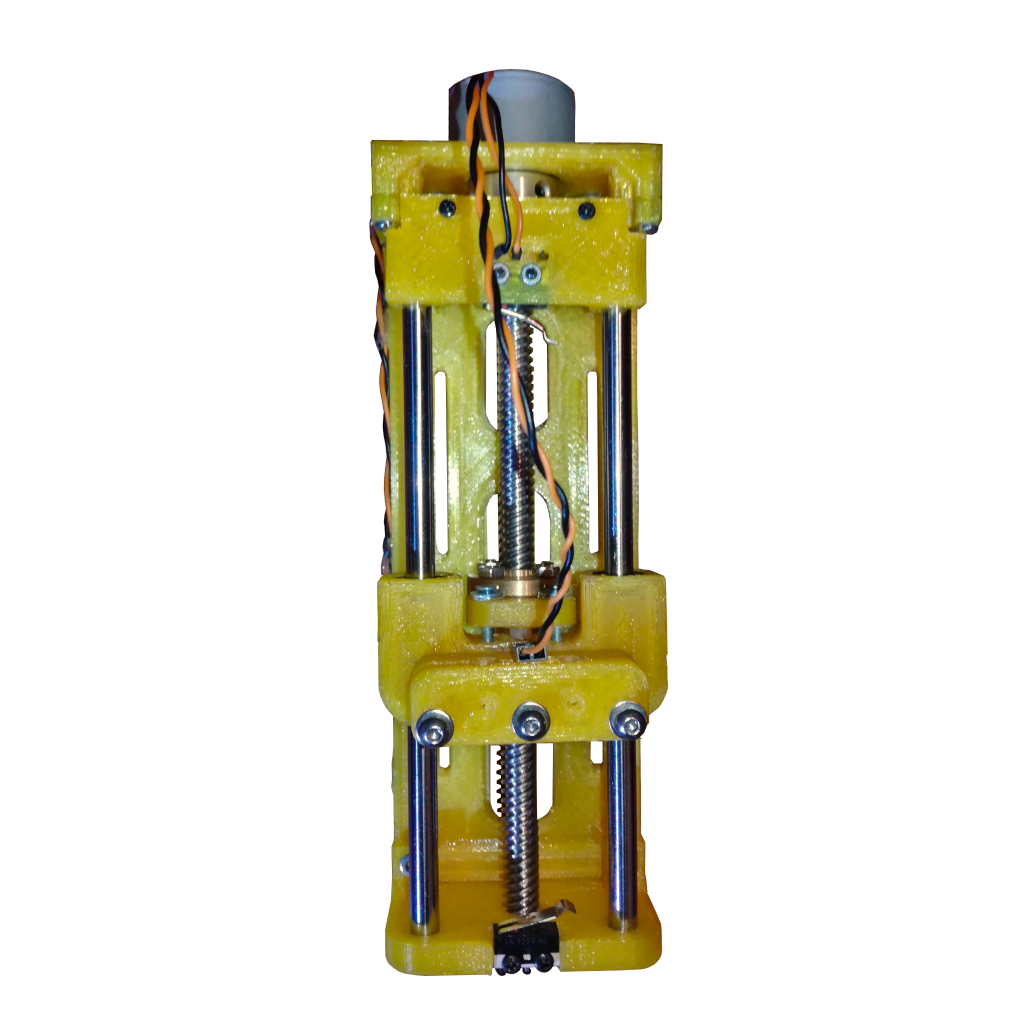
Linear Actuator
A simple 3D printed 1-axis linear actuator with a travel distance of around 110mm and a force sensor to measure the actuation force on the moving carriage.
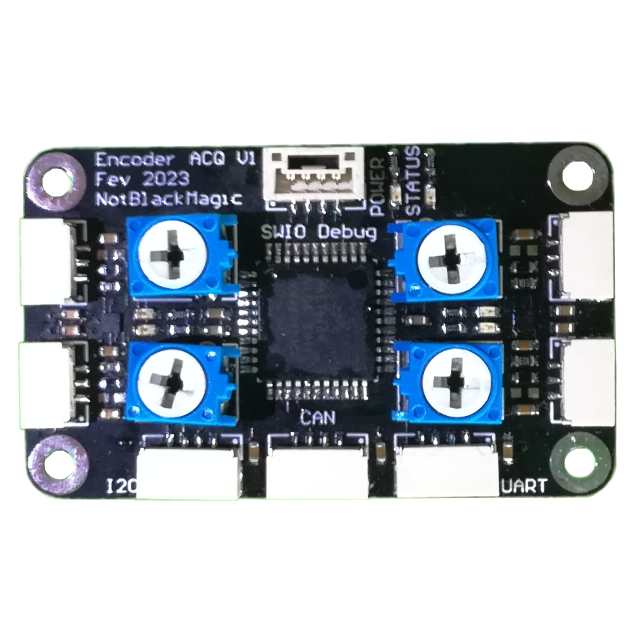
Wheel Encoder
A simple 4 channel wheel encoder system developed for the NXP MR-Buggy3 to add wheel odometry, but it can be used for other rovers as well.
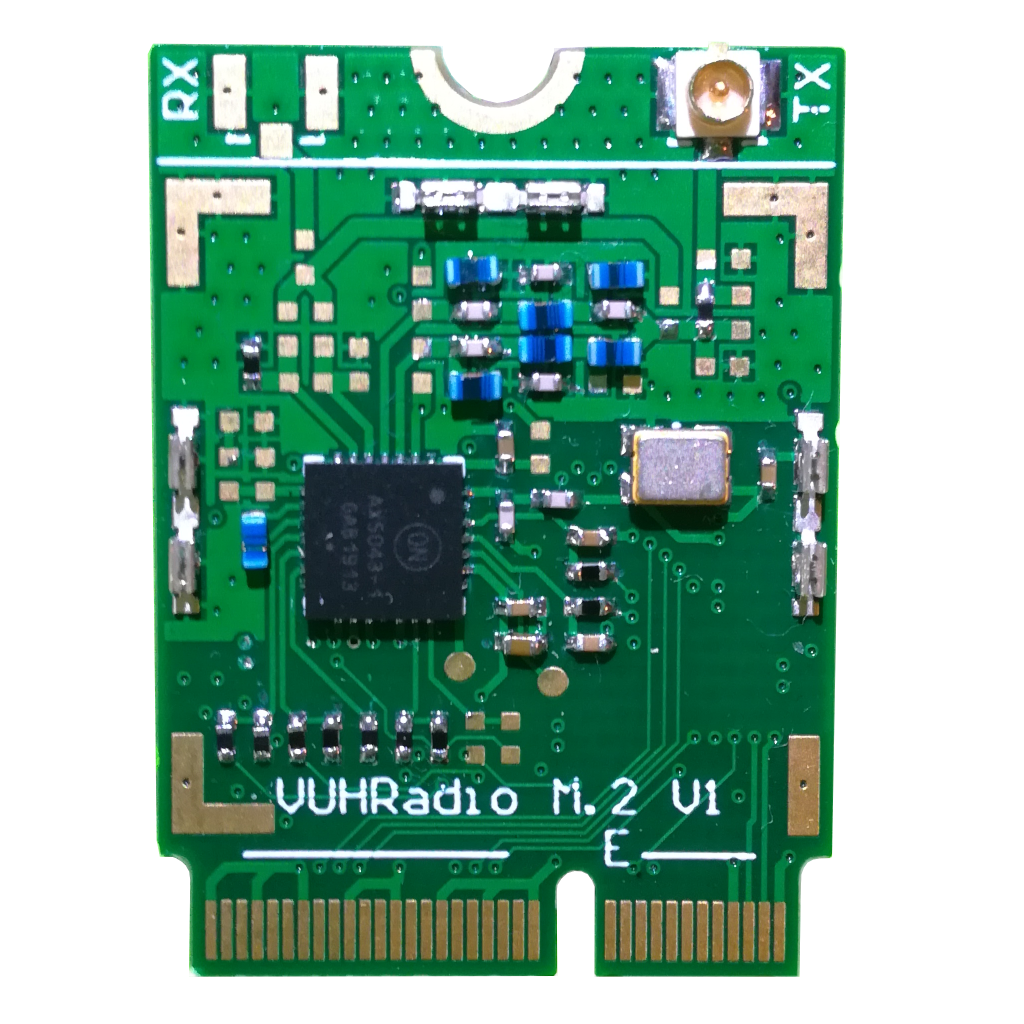
VUHF M.2
A M.2 Key E module for Sub-GHz radio bands using the AX5043. It is compatible with with HAM Radio communications using AFSK and G3RUH, and has digital and analog baseband I/Q output via the DSPMode of the AX5043.
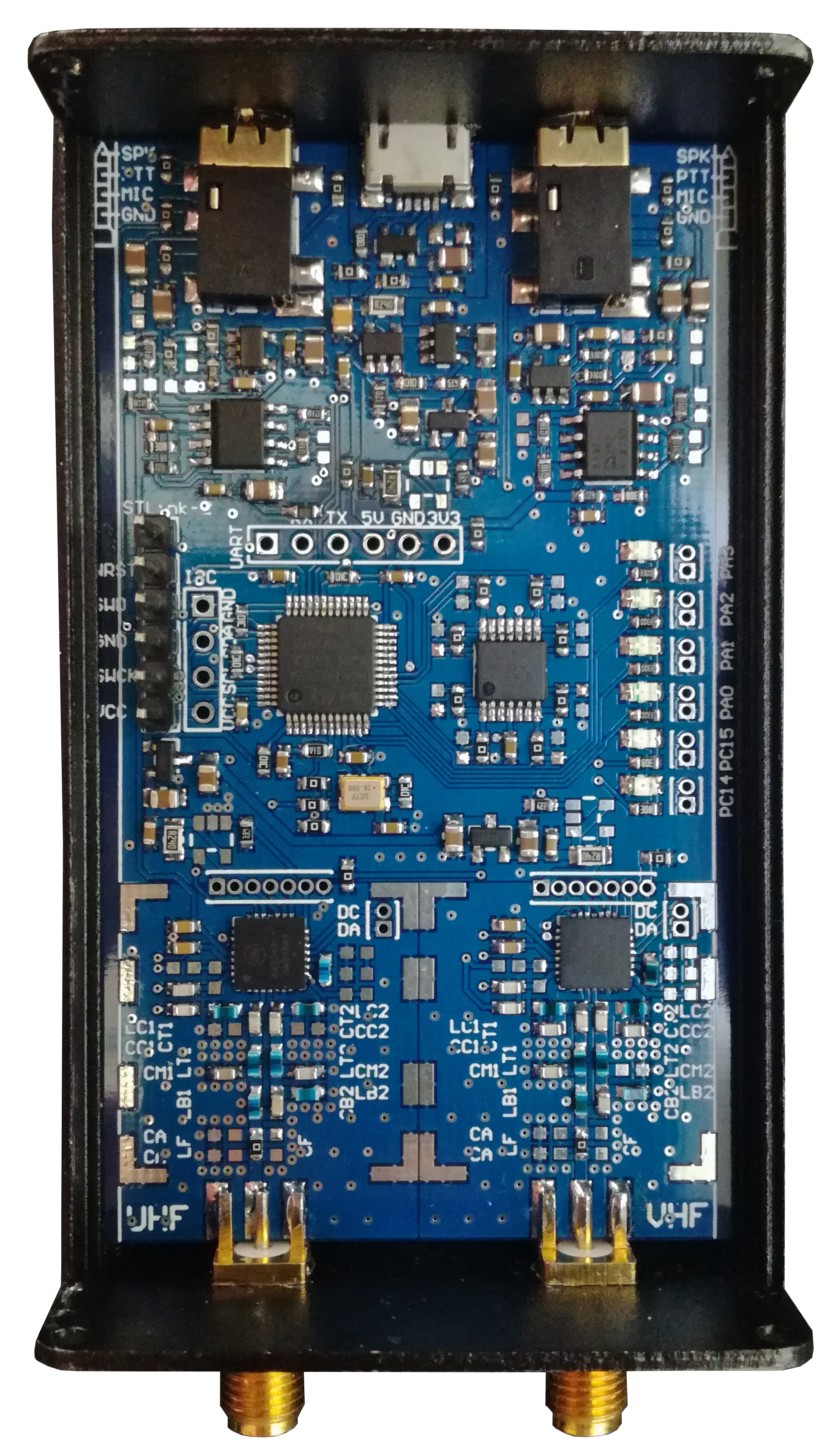
VUHF Radio
A dual band, VHF and UHF, module based around two AX5043 radios. Built to be compatible with HAM Radio communications using AFSK and G3RUH. With additional FM receiver and transmitter functionality.
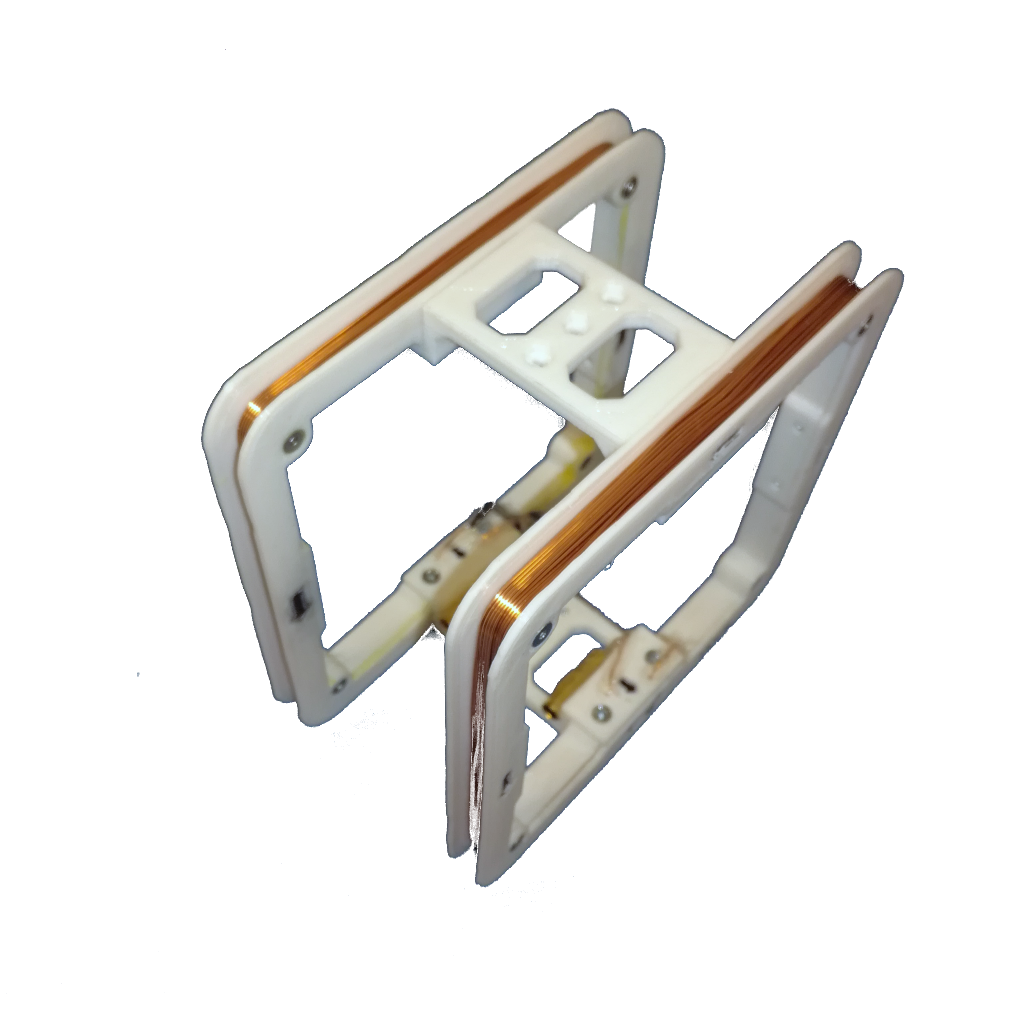
Helmholtz Cage
A small 1-Axis Helmholtz Coil using two 10x10cm coils as well as a small driver board for it. The Helmholtz is 3D printed and designed to fit a STM32 Nucleo development board and the Mini Cube Robot.
Mini Cube Robot
A small 5x5cm cubed robot with differential two wheel drive. Modular design with a simple and cheap base so that it can be built and deployed in large numbers, for swarm and cooperative robotics.
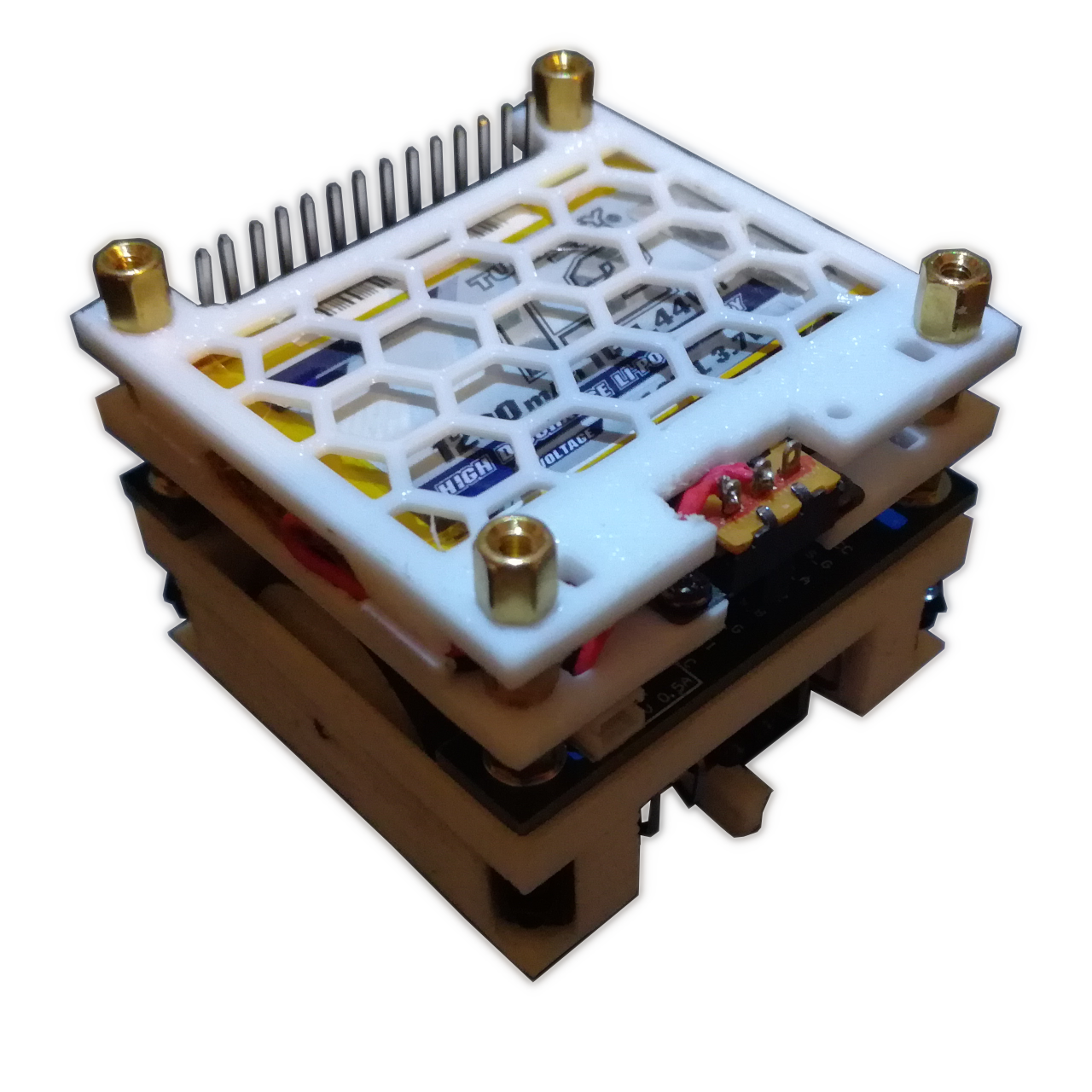
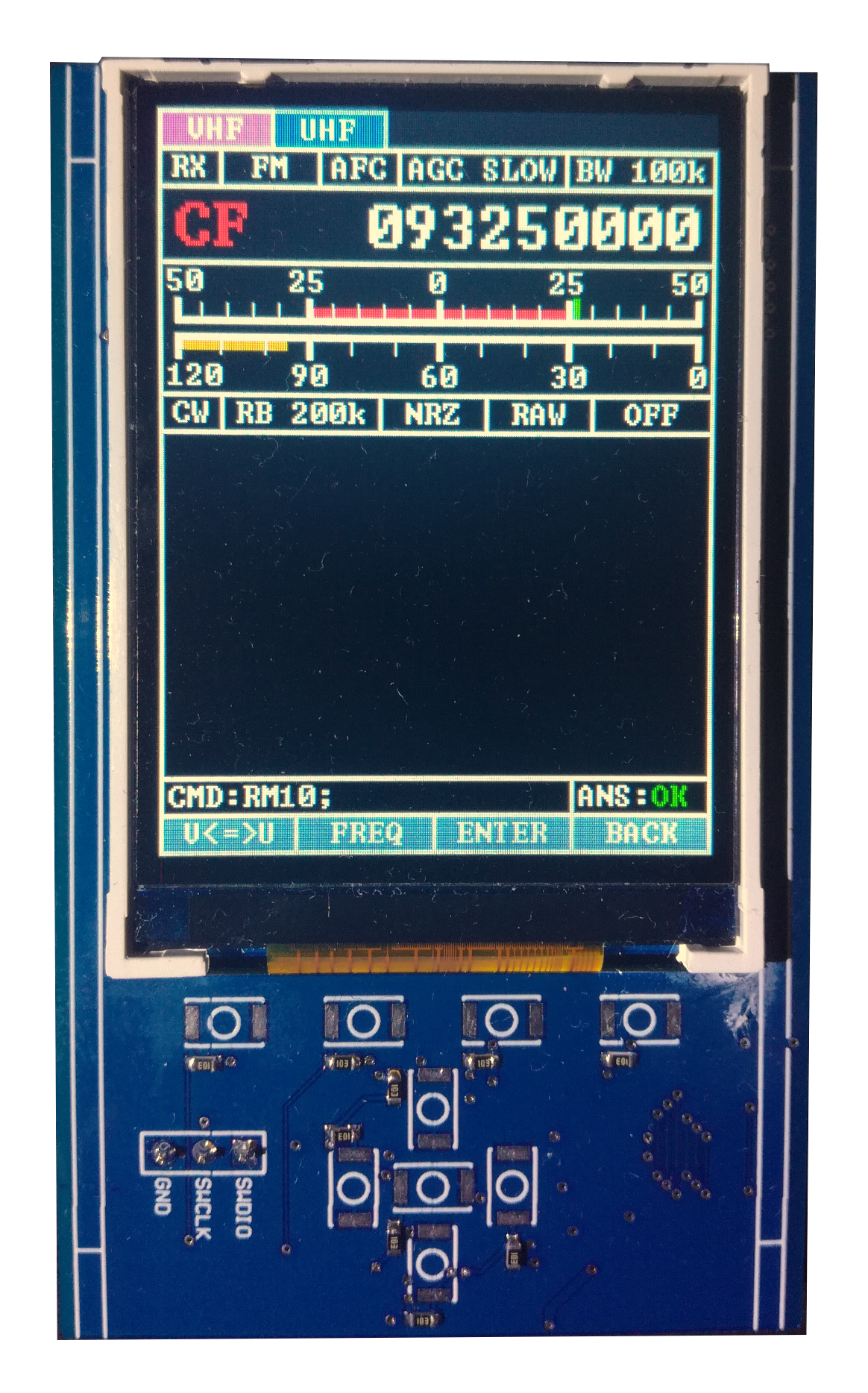
Radio Interface
Add-on board for the VUHFRadio that adds a LCD Screen, button interface and battery managing. Enables standalone use of the VUHFRadio with a graphics interface to change configurations and power from a LiPo battery.
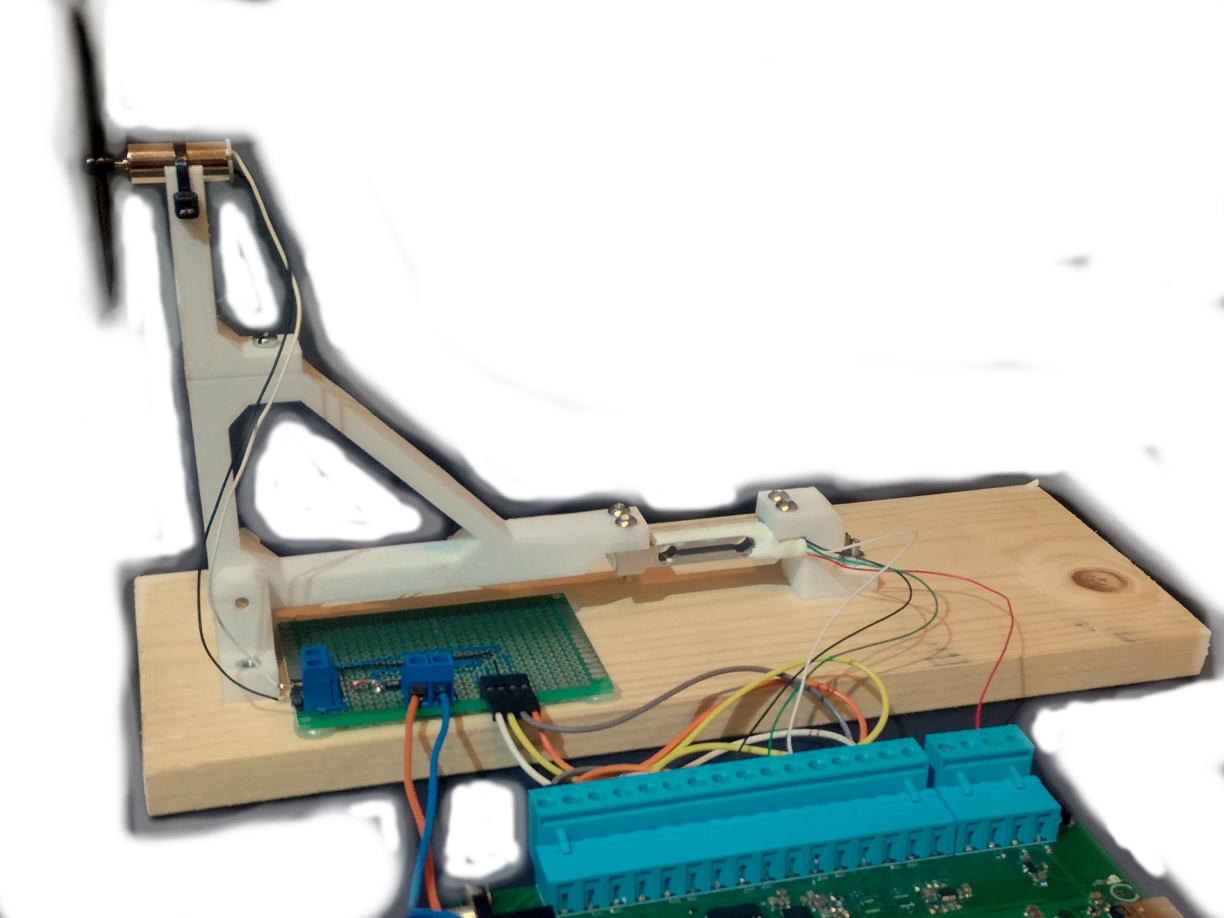
Motor Test Stand
A Motor Test Stand to measure thrust of motor + propeller combos. Semi-automatic test with simultaneous voltage, current and thrust measurement using the STM32G4 DAQ. Results for Coreless 8520 Motors for three different propellers.